聯系電話:17795608720
固定電話:029-81124223


目前,國家大力提倡生態文明建設,特別強調加大耕地保護力度,恢復礦山占用和被破壞的耕地面積迫在眉睫,我國在這方面也做了大量的工作,然而根據《2012年中國國土資源統計年鑒》統計,我國尚有80%左右的礦業廢棄地尚未修復,國內礦區生態修復工作任重道遠。
由于礦區分布零散,面積相對較小,采用傳統方法獲取礦區不同時相的影像資料,需要定期利用航空或航天手段,成本高昂,分辨率低。無論從經濟、效率還是質量方面均已不適宜現階段研究。隨著無人機遙感技術的興起,易科泰緊跟前沿科技步伐,自主設計研發了EcoDrone無人機多光譜遙感系統,搭配專業地面光譜測量系統,以其優異的性能、高效的作業及低廉的成本在礦區生態修復研究中倍受親睞。
本次研究區為河北境內某鐵礦礦區,總面積約5Km2。當地為暖溫帶半濕潤季風氣候,夏季降雨量充沛。研究區內由于生態恢復良好,植被較為茂密;由于前期采礦,導致地形高差較大,有大面積水域;鐵礦導致研究區地磁環境復雜。上述環境對航攝時間選擇、無人機性能、飛控人員操控、以及數據后處理均有很大考驗。

圖1 研究區照片
2017年8月11至13日,易科泰無人機遙感事業部運用自主研發設計的UAS-4四旋翼無人機遙感平臺搭載RedEdge5通道多光譜相機對河北某礦區進行無人機多光譜遙感數據獲取。本研究課題從技術設計、航攝實施到數據處理檢查全過程嚴格按照《數字航空攝影規范 第1部分:框幅式數字航空攝影》(GB/T 27920.1-2011)、《無人機航攝系統技術要求》(CH/Z 3002-2010)、《數字測繪成果質量檢查與驗收》(GB/T 18316-2008)等相關規范要求,圓滿完成預定區域數據采集工作。

圖2 無人機現場作業

圖3 Spectrosense手持式光譜測量系統實地測量NDVI
表1 技術參數及數據信息
|
相機 |
數據 |
|||||||
|
波段數 |
分辨率 |
焦距 |
像元大小 |
像幅 |
面積 |
相對航高 |
實際分辨率 |
影像數量 |
|
5 |
8cm/120m |
5.5mm |
3.75μm |
1280×960 |
5km2 |
130m |
8.6cm |
6240*5 |
(1)色彩融合
本次作業過程中由于受雨天、云影以及強地磁環境影響,軟件全自動處理后存在小部分色差、拼接漏洞問題,需要經過人工編輯處理消除。

圖4 RGB影像(部分)人工處理前后對比
(2)DEM內插
由于水體匹配漏洞、地形起伏引起的投影差存在,自動生成的DEM需要經過平滑內插消除高程誤差,才能用于后期專業分析。
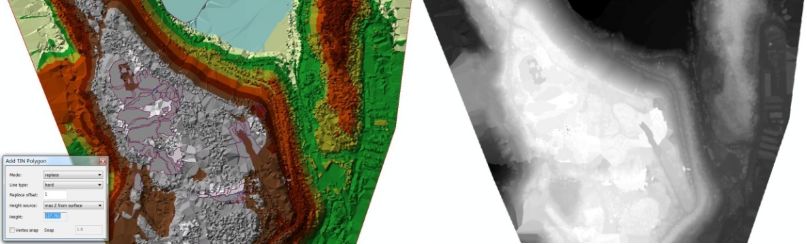
圖5 DEM構TIN內插
(3)NDVI對比校準
由于影像存在投影差導致地物有變形,因此通過光譜波段提取的NDVI值在影像變形大的區域存在較大誤差。我們可通過Spectrosense地面光譜測量系統實地測得精確NDVI值對其進行精度檢驗和校準,從而可獲得高精度的NDVI值。
表2 NDVI實測檢驗對比
|
檢查點號 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
直接測定 |
-0.11 |
0.78 |
0.84 |
0.84 |
0.42 |
0.79 |
0.82 |
0.73 |
-0.11 |
|
影像提取 |
-0.011 |
0.614 |
0.701 |
0.625 |
0.427 |
0.704 |
0.688 |
0.657 |
0.062 |
|
較差 |
-0.099 |
0.166 |
0.139 |
0.215 |
-0.007 |
0.086 |
0.132 |
0.073 |
-0.172 |
|
中誤差 |
0.134 |
||||||||
注:高精度檢驗中誤差計算公式:
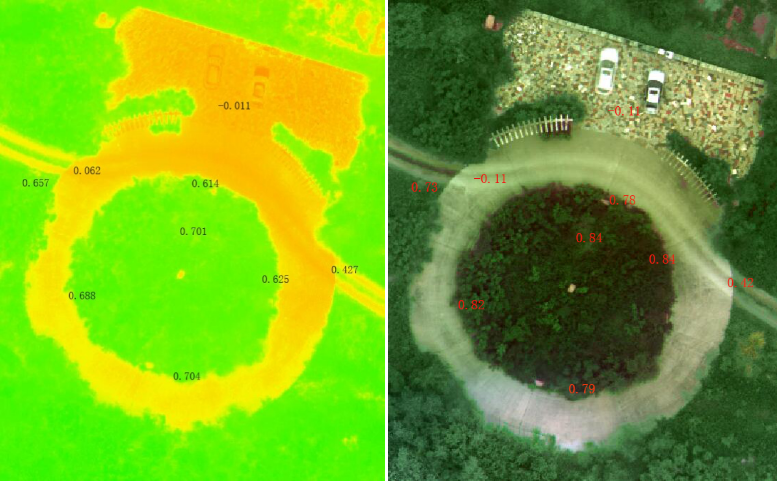
圖6 左圖為影像提取NDVI值 右圖為Spectrosense直接測定NDVI值
由中誤差看出,影像提取的NDVI和Spectrosense直接測得NDVI存在較大誤差,引起原因主要是Spectrosesnse傳感器經余弦校準測得方圓0.6m2的均值,而本次影像獲取由于雨后植被葉面未干,且相機沒有進行精確反射校準而存在雜波和畸變,提取NDVI會存在誤差。因此,紅外攝影必須避開雨后初晴或露水較大時段。
小結
EcoDrone無人機多光譜遙感系統從技術路線設計、實際作業執行、飛行保障到數據后處理整個技術體系合理高效,完全滿足科學研究對于數據質量、現勢性、數據完整性以及精度的嚴格要求。其高效便捷的作業流程在本次礦區數據獲取處理任務中,得到了客戶的高度認可。依靠易科泰生態技術有限公司在生態領域積累的豐富技術及經驗,EcoDrone無人機遙感系統在礦區生態修復研究領域必將展現廣闊的發展前景。
全部評論